Autonomous Aerial Navigation in Confined Indoor Environments
BEng Graduation Project
An autonomous navigation system is proposed for mapping and controlling an area. The proposed system uses Robot Operating System (ROS) for organizing autonomous movement and Unity3D for simulation of the system collectively, to simulate a real-world stage where a UAV maps and explores its surroundings autonomously, without the control of a user.
Abstract
In recent years, Smart City concept has gained tremendous attention, and it has a wide range of application environment for the researchers. In this concept, the use of smart buildings has very critical importance to improve the quality and interactivity of urban services. In these services security also has an important place, to set up a secure city platform in which reducing costs and ensuring sustainability are very trivial issues that need to be overcome. In this paper, we have demonstrated an autonomous aerial navigation system (by Unmanned Aerial Vehicles (UAVs)) for indoor mapping of smart buildings for the physical security control with the use of Unity3D simulation environment and Robot Operating System in a real-life scenario. In the real-world, the security needs can be overcome with the use of lots of static sensors and communication platforms. However, with the use UAVs, it is aimed to decrease the cost and increase the efficiency of the system.
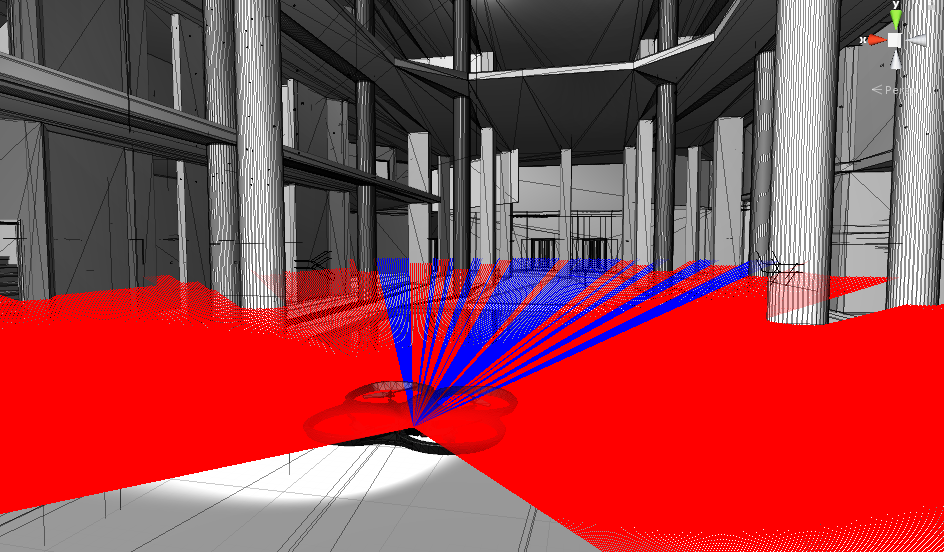
The development process of such sophisticated UAVs can be improved with the help of simulations, by removing the complexity of a real-world scenario, thus reducing the of time and money. The surrounding environment of UAV is mapped with laser scanners (LIDAR sensors). The UAV navigates autonomously within the known and unknown areas to cover as much area as possible, thus explore the indoor environment. ROS, which has various tools to help robot developers and enthusiasts create robot applications that work on real robots is used for implementing the mapping and navigation operation. The experimental results showed that the proposed approach produces a good mapping for an indoor environment of smart buildings.